
Doy comienzo al proyecto en el que estoy trabajando actualmente! Como expresa el título, estoy fabricando un brazo robot impreso, en su mayoria, con una impresora 3D.

Os dejo aquí el enlace a mi canal! Para conocer los detalles del brazo en vídeo!
La idea es fabricar un brazo de bajo coste, de 6 ejes de libertad con el que se puedan realizar tareas o procesos que no requieran una precisión absoluta. Lo mueven 5 motores paso a paso, por lo que el cotrol del mismo se hará de forma numérica con apoyo de 5 encoders magnéticos.
Se desarrolla con la plataforma Arduino. Una placa de desarrollo de software libre en la que he basado mis proyectos anteriores.
Está diseñado desde cero, basado en los modelos actuales de brazos industriales del mercado y otros proyectos encontrados en lo más profundo de internet.

El sistemas completo constará de dos partes principales.
El sistema de potencia y control:
Lo conformarán dos fuentes de alimentación y 5 drivers de control para los motores paso a paso. Un Arduino Mega además de reguladores de tensión, sistemas de arranque y emergencia y elementos de conexión.

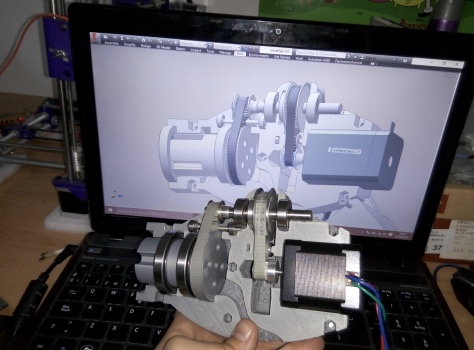
El sistema locomotriz (robot en sí):

Este sistema estará impulsado por sistemas de poleas con engranajes como los de la imagen siguiente. Aunque esto lo explicaré mas detallado en las siguientes entradas, a lo largo del montaje final del robot.
Proximamente nuevas actualizaciones del proyecto!



 El proyecto MultiWii dispone de un Software para la configuración básica de la placa controladora. Desde aquí, accederemos a los controles PID del Drone, el uso y modificación de los canales auxiliares, modos de vuelo, planificación de vuelo, etcétera.
El proyecto MultiWii dispone de un Software para la configuración básica de la placa controladora. Desde aquí, accederemos a los controles PID del Drone, el uso y modificación de los canales auxiliares, modos de vuelo, planificación de vuelo, etcétera. 









